Differential (mechanical device)
.jpg)
A differential is a gear train with three shafts that has the property that the angular velocity of one shaft is the average of the angular velocities of the others, or a fixed multiple of that average.
Overview
.jpg)


In automobiles and other wheeled vehicles, the differential allows the outer drive wheel to rotate faster than the inner drive wheel during a turn. This is necessary when the vehicle turns, making the wheel that is traveling around the outside of the turning curve roll farther and faster than the other. The average of the rotational speed of the two driving wheels equals the input rotational speed of the drive shaft. An increase in the speed of one wheel is balanced by a decrease in the speed of the other.
When used in this way, a differential couples the input shaft (or prop shaft) to the pinion, which in turn runs on the ring gear of the differential. This also works as reduction gearing. On rear wheel drive vehicles the differential may connect to half-shafts inside an axle housing, or drive shafts that connect to the rear driving wheels. Front wheel drive vehicles tend to have the pinion on the end of the main-shaft of the gearbox and the differential is enclosed in the same housing as the gearbox. There are individual drive-shafts to each wheel.
A differential consists of one input, the drive shaft, and two outputs which are the two drive wheels, however the rotation of the drive wheels are coupled to each other by their connection to the roadway. Under normal conditions, with small tire slip, the ratio of the speeds of the two driving wheels is defined by the ratio of the radii of the paths around which the two wheels are rolling, which in turn is determined by the track-width of the vehicle (the distance between the driving wheels) and the radius of the turn.
Non-automotive uses of differentials include performing analog arithmetic. Two of the differential's three shafts are made to rotate through angles that represent (are proportional to) two numbers, and the angle of the third shaft's rotation represents the sum or difference of the two input numbers. The earliest known use of a differential gear is in the Antikythera mechanism, circa 80 BCE, which used a differential gear to control a small sphere representing the moon from the difference between the sun and moon position pointers. The ball was painted black and white in hemispheres, and graphically showed the phase of the moon at a particular point in time.[1] See also the Chinese South-pointing chariot. An equation clock that used a differential for addition was made in 1720. In the 20th Century, large assemblies of many differentials were used as analog computers, calculating, for example, the direction in which a gun should be aimed. However, the development of electronic digital computers has made these uses of differentials obsolete. Military uses may still exist. See Electromagnetic pulse. Practically all the differentials that are now made are used in automobiles and similar vehicles.
History
There are many claims to the invention of the differential gear, but it is possible that it was known, at least in some places, in ancient times. Some historical milestones of the differential include:
- 100 BC–70 BC: The Antikythera mechanism has been dated to this period. It was discovered in 1902 on a shipwreck by sponge divers, and modern research suggests that it used a differential gear to determine the angle between the ecliptic positions of the Sun and Moon, and thus the phase of the Moon.[1][2]
- 30 BC–20 BC: Differential gear systems possibly used in China
- 227–239 AD: Ma Jun from the Kingdom of Wei in China invents the first historically verifiable south-pointing chariot, which provided cardinal direction as a non-magnetic, mechanized compass. Some such chariots may have used differential gears.
.jpg) South-pointing chariot model
South-pointing chariot model - 658, 666 AD: two Chinese Buddhist monks and engineers create south-pointing chariots for Emperor Tenji of Japan.
- 1027, 1107 AD: Documented Chinese reproductions of the south-pointing chariot by Yan Su and then Wu Deren, which described in detail the mechanical functions and gear ratios of the device much more so than earlier Chinese records.
- 1720: Joseph Williamson uses a differential gear in a clock.
- 1810: Rudolph Ackermann of Germany invents a four-wheel steering system for carriages, which some later writers mistakenly report as a differential.
- 1827: modern automotive differential patented by watchmaker Onésiphore Pecqueur (1792–1852) of the Conservatoire National des Arts et Métiers in France for use on a steam wagon.[3][4]
- 1832: Richard Roberts of England patents "gear of compensation", a differential for road locomotives.
- 1874: Aveling and Porter of Rochester, Kent list a crane locomotive in their catalogue fitted with their patent differential gear on the rear axle.[5]
- 1876: James Starley of Coventry invents chain-drive differential for use on bicycles; invention later used on automobiles by Karl Benz.
- 1897: first use of differential on an Australian steam car by David Shearer.
- 1958: Vernon Gleasman patents the Torsen dual-drive differential, a type of limited-slip differential that relies solely on the action of gearing, instead of a combination of clutches and gears.
Epicyclic differential
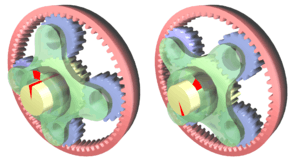
An epicyclic differential can use epicyclic gearing to split and apportion torque asymmetrically between the front and rear axles. An epicyclic differential is at the heart of the Toyota Prius automotive drive train, where it interconnects the engine, motor-generators, and the drive wheels (which have a second differential for splitting torque as usual). It has the advantage of being relatively compact along the length of its axis (that is, the sun gear shaft).
Epicyclic gears are also called planetary gears because the axes of the planet gears revolve around the common axis of the sun and ring gears that they mesh with and roll between. In the image, the yellow shaft carries the sun gear which is almost hidden. The blue gears are called planet gears and the pink gear is the ring gear or annulus.
Ring gears are also used in starter motors.
Spur-gear differential
This is another type of differential that was used in some early automobiles, more recently the Oldsmobile Toronado, as well as other non-automotive applications. It consists of spur gears only.
A spur-gear differential has two equal-sized spur gears, one for each half-shaft, with a space between them. Instead of the Bevel gear, also known as a miter gear, assembly (the "spider") at the centre of the differential, there is a rotating carrier on the same axis as the two shafts. Torque from a prime mover or transmission, such as the drive shaft of a car, rotates this carrier.
Mounted in this carrier are one or more pairs of identical pinions, generally longer than their diameters, and typically smaller than the spur gears on the individual half-shafts. Each pinion pair rotates freely on pins supported by the carrier. Furthermore, the pinion pairs are displaced axially, such that they mesh only for the part of their length between the two spur gears, and rotate in opposite directions. The remaining length of a given pinion meshes with the nearer spur gear on its axle. Therefore, each pinion couples that spur gear to the other pinion, and in turn, the other spur gear, so that when the drive shaft rotates the carrier, its relationship to the gears for the individual wheel axles is the same as that in a bevel-gear differential.
A spur gear differential is constructed from two identical coaxial epicyclic gear trains assembled with a single carrier such that their planet gears are engaged. This forms a planetary gear train with a fixed carrier train ratio R = -1.
In this case, the fundamental formula for the planetary gear train yields,

or

Thus, the angular velocity of the carrier of a spur gear differential is the average of the angular velocities of the sun and annular gears.[6]
In discussing the spur gear differential, the use of the term annular gear is a convenient way to distinguish the sun gears of the two epicyclic gear trains. The second sun gear serves the same purpose as the annular gear of a simple planetary gear train, but clearly does not have the internal gear mate that is typical of an annular gear.
Non-automotive applications


Chinese south-pointing chariots may also have been very early applications of differentials. The chariot had a pointer which constantly pointed to the south, no matter how the chariot turned as it travelled. It could therefore be used as a type of compass. It is widely thought that a differential mechanism responded to any difference between the speeds of rotation of the two wheels of the chariot, and turned the pointer appropriately. However, the mechanism was not precise enough, and, after a few miles of travel, the dial could have very well been pointing in the complete opposite direction.
The earliest definitely verified use of a differential was in a clock made by Joseph Williamson in 1720. It employed a differential to add the equation of time to local mean time, as determined by the clock mechanism, to produce solar time, which would have been the same as the reading of a sundial. During the 18th Century, sundials were considered to show the "correct" time, so an ordinary clock would frequently have to be readjusted, even if it worked perfectly, because of seasonal variations in the equation of time. Williamson's and other equation clocks showed sundial time without needing readjustment. Nowadays, we consider clocks to be "correct" and sundials usually incorrect, so many sundials carry instructions about how to use their readings to obtain clock time.
In the first half of the twentieth century, mechanical analog computers, called differential analyzers, were constructed that used differential gear trains to perform addition and subtraction. The U.S. Navy Mk.1 gun fire control computer used about 160 differentials of the bevel-gear type.
A differential gear train can be used to allow a difference between two input axles. Mills often used such gears to apply torque in the required axis. Differentials are also used in this way in watchmaking to link two separate regulating systems with the aim of averaging out errors. Greubel Forsey use a differential to link two double tourbillon systems in their Quadruple Differential Tourbillon.
Application to vehicles
_24fps_selection.webm.jpg)
A vehicle with two drive wheels has the problem that when it turns a corner the drive wheels must rotate at different speeds to maintain traction. The automotive differential is designed to drive a pair of wheels while allowing them to rotate at different speeds. In vehicles without a differential, such as karts, both driving wheels are forced to rotate at the same speed, usually on a common axle driven by a simple chain-drive mechanism.
When cornering, the inner wheel travels a shorter distance than the outer wheel, so without a differential either the inner wheel rotates too quickly or the outer wheel rotates too slowly, which results in difficult and unpredictable handling, damage to tires and roads, and strain on (or possible failure of) the drivetrain.
In rear-wheel drive automobiles the central drive shaft (or prop shaft) engages the differential through a hypoid gear(ring and pinion). The ring gear is mounted on the carrier of the planetary chain that forms the differential. This hypoid gear is a bevel gear that changes the direction of the drive rotation.

Functional description


The following description of a differential applies to a traditional rear-wheel-drive car or truck with an open or limited slip differential combined with a reduction gearset using bevel gears (these are not strictly necessary – see spur-gear differential):
Thus, for example, if the car is making a turn to the right, the main ring gear may make 10 full rotations. During that time, the left wheel will make more rotations because it has farther to travel, and the right wheel will make fewer rotations as it has less distance to travel. The sun gears (which drive the axle half-shafts) will rotate at different speeds relative to the ring gear (one faster, one slower) by, say, 2 full turns each (4 full turns relative to each other), resulting in the left wheel making 12 rotations, and the right wheel making 8 rotations.
The rotation of the ring gear is always the average of the rotations of the side sun gears. This is why if the driven roadwheels are lifted clear of the ground with the engine off, and the drive shaft is held (say, leaving the transmission in gear preventing the ring gear from turning inside the differential), manually rotating one driven roadwheel causes the opposite roadwheel to rotate in the opposite direction by the same amount.
When the vehicle is traveling in a straight line there will be no differential movement of the planetary system of gears other than the minute movements necessary to compensate for slight differences in wheel diameter, undulations in the road which make for a longer or shorter wheel path, etc.
Loss of traction
One undesirable side effect of an open differential is that it can limit traction under less than ideal conditions. The amount of traction required to propel the vehicle at any given moment depends on the load at that instant—how heavy the vehicle is, how much drag and friction there is, the gradient of the road, the vehicle's momentum, and so on.
The torque applied to each driving wheel is the result of the engine, transmission, and drive axle applying a twisting force against the resistance of the traction at that roadwheel. In lower gears, and thus at lower speeds, and unless the load is exceptionally high, the drivetrain can supply as much torque as necessary, so the limiting factor becomes the traction under each wheel. It is therefore convenient to define traction as the amount of force that can be transmitted between the tire and the road surface before the wheel starts to slip. If the torque applied to one of the drive wheels exceeds the threshold of traction, then that wheel will spin, and thus provide torque only at the other driven wheel equal to the sliding friction at the slipping wheel. The reduced net traction may still be enough to propel the vehicle slowly.
An open (non-locking or otherwise traction-aided) differential always supplies close to equal torque to each side. To illustrate how this can limit torque applied to the driving wheels, imagine a simple rear-wheel drive vehicle, with one rear roadwheel on asphalt with good grip, and the other on a patch of slippery ice. It takes very little torque to spin the side on slippery ice, and because a differential splits torque equally to each side, the torque that is applied to the side that is on asphalt is limited to this amount.[7][8]
Based on the load, gradient, etc, the vehicle requires a certain amount of torque applied to the drive wheels to move forward. Since an open differential limits total torque applied to both drive wheels to the amount used by the lower traction wheel multiplied by 2, when one wheel is on a slippery surface, the total torque applied to the driving wheels may be lower than the minimum torque required for vehicle propulsion.[9]
A proposed alternate way to distribute power to the wheels, is to use the concept of a gearless differential, about which a review has been reported by Provatidis,[10] but the various configurations seem to correspond either to the "sliding pins and cams" type, such as the ZF B-70 available on early VWs, or are a variation of the ball differential.
Many newer vehicles feature traction control, which partially mitigates the poor traction characteristics of an open differential by using the anti-lock braking system to limit or stop the slippage of the low traction wheel, increasing the torque that can be applied to the opposite wheel. While not as effective as a traction-aided differential, it is better than a simple mechanical open differential with no traction assistance.
.JPG)

Active differentials
A relatively new technology is the electronically controlled 'active differential'. An electronic control unit (ECU) uses inputs from multiple sensors, including yaw rate, steering input angle, and lateral acceleration—and adjusts the distribution of torque to compensate for undesirable handling behaviours like understeer. Active differentials used to play a large role in the World Rally Championship, but in the 2006 season the FIA has limited the use of active differentials to only those drivers who have not competed in the World Rally Championship in the last five years.
Fully integrated active differentials are used on the Ferrari F430, Mitsubishi Lancer Evolution, and on the rear wheels in the Acura RL. A version manufactured by ZF is also being offered on the B8 chassis Audi S4 and Audi A4.[11] The Volkswagen Golf GTI Mk7 in Performance trim also has an electronically controlled front-axle transverse differential lock, also known as VAQ.[12]
The second constraint of the differential is passive—it is actuated by the friction kinematics chain through the ground. The difference in torque on the roadwheels and tires (caused by turns or bumpy ground) drives the second degree of freedom, (overcoming the torque of inner friction) to equalise the driving torque on the tires. The sensitivity of the differential depends on the inner friction through the second degree of freedom. All of the differentials (so called "active" and "passive") use clutches and brakes for restricting the second degree of freedom, so all suffer from the same disadvantage—decreased sensitivity to a dynamically changing environment. The sensitivity of the ECU controlled differential is also limited by the time delay caused by sensors and the response time of the actuators.
Rotation rate governing differentials
A rotation rate-governing differential eliminates the aforementioned time delay issue by mechanically coupling the two wheels together through a set of planetary gears and then strictly governing the allowable difference in their relative rotation rates at all times. This forces power to be applied fully and instantly to both wheels (similar to a locking differential), while also preserving the vehicle's cornering agility. Unlike traditional active-differentials, these systems do not use brakes, clutch packs, or any other friction parts to respond to wheel slip. Instead, they use a small, low-speed stepper motor to keep the differential rotation rates of the wheels within a plausible limit for the given steering angle.[13]
Automobiles without differentials
Although most automobiles in the developed world use differentials there are a few that do not. Several different types exist:
- Race cars and trucks in certain classes. Drag racing is done in a straight line (and often on a prepared surface), which obviates the need for a differential. A spool is used to make a solid connection between both drive wheels, which is simpler and less likely to break under very heavy acceleration. Racing on dirt or mud tracks also allows the use of spools, because the loose surface gives way while cornering. NASCAR mandates the use of spools in their cars, which does cause axle wind-up, and degrades handling in turns. Other forms of racing without differentials include tractor pulling, mud bogging, and other 4x4 motorsports where differential action is not needed.
- Vehicles with a single driving wheel. Besides motorcycles, which are generally not classified as automobiles, this group includes most three-wheeled cars. These were quite common in Europe in the mid-20th Century, but have now become rare there. They are still common in some areas of the developing world, such as India. Some early four-wheeled cars also had only one driving wheel to avoid the need for a differential. However, this arrangement led to many problems. The system was unbalanced, the driving wheel would easily spin, etc.. Because of these problems, few such vehicles were made.
- Vehicles using two freewheels. A freewheel, as used on a pedal bicycle for example, allows a road wheel to rotate faster than the mechanism that drives it, allowing a cyclist to stop pedalling while going downhill. Some early automobiles had the engine driving two freewheels, one for each driving road wheel. When the vehicle turned, the engine would continue to drive the wheel on the inside of the curve, but the wheel on the outside was permitted to rotate faster by its freewheel. Thus, while turning, the vehicle had only one driving wheel. Driving in reverse is impossible as is engine braking due to the freewheels.
- Vehicles with two continuously variable transmissions, such as the DAF Daffodil. The Daffodil, and other similar vehicles which were made until the 1970s by the Dutch company DAF, had a type of transmission that used an arrangement of belts and pulleys to provide an infinite number of gear ratios. The engine drove two separate transmissions which ran the two driving wheels. When the vehicle turned, the two wheels could rotate at different speeds, making the two transmissions shift to different gear ratios, thus functionally substituting for a differential. The slower moving wheel received more driving torque than the faster one, so the system had limited-slip characteristics. The duplication also provided redundancy. If one belt broke, the vehicle could still be driven.
- Light vehicles with closely spaced rear wheels, such as the Isetta and Opperman Unicar, or very low mass vehicles.
- Vehicles with separate motors for the driving wheels. Electric cars can have a separate motor for each driving wheel, eliminating the need for a differential, but usually with some form of gearing at each motor to get the large wheel torques necessary. A multi-motor electric vehicle such as the Dual Motor Tesla Model S can electronically control the power distribution between the motors on a millisecond scale, in this case acting as a centre differential where open differentials are still employed left-to-right.[14]
See also
- Ball differential
- Equation clock
- Hermann Aron#Electricity meters
- Limited slip differential
- Locking differential
- Torque vectoring
- Whippletree (mechanism)
- Tests on rollers
References
- 1 2 Wright, M. T. (2007). "The Antikythera Mechanism reconsidered" (PDF). Interdisciplinary science reviews. 32 (1). Retrieved 20 May 2014.
- ↑ Presentation given to the NHRF in Athens, 6 March 2007 – M. T. Wright
- ↑ Britannica Online
- ↑ "History of the Automobile". General Motors Canada. Retrieved 2011-01-09.
- ↑ Preston, J.M. (1987), Aveling & Porter, Ltd. Rochester., North Kent Books, pp. 13–14, ISBN 0-948305-03-7 includes sectional drawing.
- ↑ J. J. Uicker, G. R. Pennock and J. E. Shigley, 2003, Theory of Machines and Mechanisms, Oxford University Press, New York.
- ↑ Bonnick, Allan. (2001) "Automotive Computer Controlled Systems p. 22
- ↑ Bonnick, Allan. (2008). "Automotive Science and Mathematics p. 123
- ↑ Chocholek, S. E. (1988) "The development of a differential for the improvement of traction control"
- ↑ Provatidis, Christopher, G. (2003). "A critical presentation of Tsiriggakis’ gearless differential". Mobility & Vehicles Mechanics 29 (4): 25–46; also: http://users.ntua.gr/cprovat/index_en.htm
- ↑ "ZF Press release". Zf.com. Retrieved 2011-01-09.
- ↑ "Golf VII GTI". pistonheads.com. Retrieved 2013-06-24.
- ↑ http://www.sparcdrive.com
- ↑ Davies, Alex (2014-10-10). "The Model D Is Tesla's Most Powerful Car Ever, Plus Autopilot". Wired.com. Retrieved 2014-10-11.
Musk said the added efficiency is thanks to the electronic system that will shift power between the front and rear motors from one millisecond to the next, so each is always operating at its most efficient point
External links
| Wikimedia Commons has media related to Automobile differentials. |
- A video of a 3D model of an open differential
- An article explaining differentials with illustrations and video
- "Around the Corner" (1937), a Jam Handy film made for Chevrolet explaining very clearly how an open differential works.
- Popular Science, May 1946, How Your Car Turns Corners, a large article with numerous illustrations on how differentials work.