Standard basis
In mathematics, the standard basis (also called natural basis) for a Euclidean space is the set of unit vectors pointing in the direction of the axes of a Cartesian coordinate system. For example, the standard basis for the Euclidean plane is formed by vectors

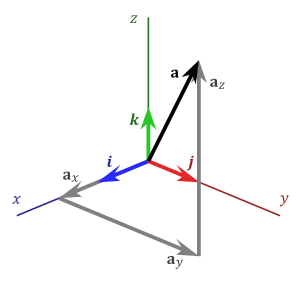
and the standard basis for three-dimensional space is formed by vectors

Here the vector ex points in the x direction, the vector ey points in the y direction, and the vector ez points in the z direction. There are several common notations for these vectors, including {ex, ey, ez}, {e1, e2, e3}, {i, j, k}, and {x, y, z}. These vectors are sometimes written with a hat to emphasize their status as unit vectors. Each of these vectors is sometimes referred to as the versor of the corresponding Cartesian axis.
These vectors are a basis in the sense that any other vector can be expressed uniquely as a linear combination of these. For example, every vector v in three-dimensional space can be written uniquely as

the scalars vx, vy, vz being the scalar components of the vector v.
In -dimensional Euclidean space, the standard basis consists of n distinct vectors


where ei denotes the vector with a 1 in the th coordinate and 0's elsewhere.

Standard bases can be defined for other vector spaces, such as polynomials and matrices. In both cases, the standard basis consists of the elements of the vector space such that all coefficients but one are 0 and the non-zero one is 1. For polynomials, the standard basis thus consists of the monomials and is commonly called monomial basis. For matrices , the standard basis consists of the m×n-matrices with exactly one non-zero entry, which is 1. For example, the standard basis for 2×2 matrices is formed by the 4 matrices


Properties
By definition, the standard basis is a sequence of orthogonal unit vectors. In other words, it is an ordered and orthonormal basis.
However, an ordered orthonormal basis is not necessarily a standard basis. For instance the two vectors representing a 30° rotation of the 2D standard basis described above, i.e.


are also orthogonal unit vectors, but they are not aligned with the axes of the Cartesian coordinate system, so the basis with these vectors does not meet the definition of standard basis.
Generalizations
There is a standard basis also for the ring of polynomials in n indeterminates over a field, namely the monomials.
All of the preceding are special cases of the family

where is any set and is the Kronecker delta, equal to zero whenever i ≠ j and equal to 1 if i = j. This family is the canonical basis of the R-module (free module)



of all families

from I into a ring R, which are zero except for a finite number of indices, if we interpret 1 as 1R, the unit in R.
Other usages
The existence of other 'standard' bases has become a topic of interest in algebraic geometry, beginning with work of Hodge from 1943 on Grassmannians. It is now a part of representation theory called standard monomial theory. The idea of standard basis in the universal enveloping algebra of a Lie algebra is established by the Poincaré–Birkhoff–Witt theorem.
Gröbner bases are also sometimes called standard bases.
In physics, the standard basis vectors for a given Euclidean space are sometimes referred to as the versors of the axes of the corresponding Cartesian coordinate system.
See also
References
- Ryan, Patrick J. (1986). Euclidean and non-Euclidean geometry: an analytical approach. Cambridge; New York: Cambridge University Press. ISBN 0-521-27635-7. (page 198)
- Schneider, Philip J.; Eberly, David H. (2003). Geometric tools for computer graphics. Amsterdam; Boston: Morgan Kaufmann Publishers. ISBN 1-55860-594-0. (page 112)