Robbins' theorem
In graph theory, Robbins' theorem, named after Herbert Robbins (1939), states that the graphs that have strong orientations are exactly the 2-edge-connected graphs. That is, it is possible to choose a direction for each edge of an undirected graph G, turning into a directed graph that has a path from every vertex to every other vertex, if and only if G is connected and has no bridge.
Orientable graphs
Robbins' characterization of the graphs with strong orientations may be proven using ear decomposition, a tool introduced by Robbins for this task.
If a graph has a bridge, then it cannot be strongly orientable, for no matter which orientation is chosen for the bridge there will be no path from one of the two endpoints of the bridge to the other.
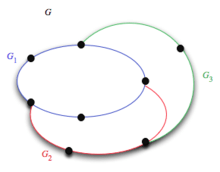
In the other direction, it is necessary to show that every connected bridgeless graph can be strongly oriented. As Robbins proved, every such graph has a partition into a sequence of subgraphs called "ears", in which the first subgraph in the sequence is a cycle and each subsequent subgraph is a path, with the two path endpoints both belonging to earlier ears in the sequence. Orienting the edges within each ear so that it forms a directed cycle or a directed path leads to a strongly connected orientation of the overall graph.[1]
Related results
An extension of Robbins' theorem to mixed graphs by Boesch & Tindell (1980) shows that, if G is a graph in which some edges may be directed and others undirected, and G contains a path respecting the edge orientations from every vertex to every other vertex, then any undirected edge of G that is not a bridge may be made directed without changing the connectivity of G. In particular, a bridgeless undirected graph may be made into a strongly connected directed graph by a greedy algorithm that directs edges one at a time while preserving the existence of paths between every pair of vertices; it is impossible for such an algorithm to get stuck in a situation in which no additional orientation decisions can be made.
Algorithms and complexity
A strong orientation of a given bridgeless undirected graph may be found in linear time by performing a depth first search of the graph, orienting all edges in the depth first search tree away from the tree root, and orienting all the remaining edges (which must necessarily connect an ancestor and a descendant in the depth first search tree) from the descendant to the ancestor.[2] Although this algorithm is not suitable for parallel computers, due to the difficulty of performing depth first search on them, alternative algorithms are available that solve the problem efficiently in the parallel model.[3] Parallel algorithms are also known for finding strongly connected orientations of mixed graphs.[4]
Notes
- ↑ Gross & Yellen (2006).
- ↑ Vishkin (1985) credits this observation to Atallah (1984), and Balakrishnan (1996) credits it to Roberts (1978). But as Clark & Holton (1991) point out, the same algorithm is already included (with the assumption of 2-vertex-connectivity rather than 2-edge-connectivity) in the seminal earlier work of Hopcroft & Tarjan (1973) on depth first search.
- ↑ Vishkin (1985).
- ↑ Soroker (1988).
References
- Atallah, Mikhail J. (1984), "Parallel strong orientation of an undirected graph", Information Processing Letters, 18 (1): 37–39, doi:10.1016/0020-0190(84)90072-3, MR 742079.
- Balakrishnan, V. K. (1996), "4.6 Strong Orientation of Graphs", Introductory Discrete Mathematics, Mineola, NY: Dover Publications Inc., p. 135, ISBN 0-486-69115-2, MR 1402469.
- Boesch, Frank; Tindell, Ralph (1980), "Robbins's theorem for mixed multigraphs", The American Mathematical Monthly, 87 (9): 716–719, doi:10.2307/2321858, MR 602828.
- Clark, John; Holton, Derek Allan (1991), "7.4 Traffic Flow", A first look at graph theory, Teaneck, NJ: World Scientific Publishing Co. Inc., pp. 254–260, ISBN 981-02-0489-2, MR 1119781.
- Gross, Jonathan L.; Yellen, Jay (2006), "Characterization of strongly orientable graphs", Graph Theory and its Applications, Discrete Mathematics and its Applications (2nd ed.), Boca Raton, FL: Chapman & Hall/CRC, pp. 498–499, ISBN 978-1-58488-505-4, MR 2181153.
- Hopcroft, John; Tarjan, Robert (1973), "Algorithm 447: efficient algorithms for graph manipulation", Communications of the ACM, 16 (6): 372–378, doi:10.1145/362248.362272.
- Robbins, H. E. (1939), "A theorem on graphs, with an application to a problem on traffic control", American Mathematical Monthly, 46: 281–283, doi:10.2307/2303897, JSTOR 2303897.
- Roberts, Fred S. (1978), "Chapter 2. The One-Way Street Problem", Graph Theory and its Applications to Problems of Society, CBMS-NSF Regional Conference Series in Applied Mathematics, 29, Philadelphia, Pa.: Society for Industrial and Applied Mathematics (SIAM), pp. 7–14, MR 508050.
- Soroker, Danny (1988), "Fast parallel strong orientation of mixed graphs and related augmentation problems", Journal of Algorithms, 9 (2): 205–223, doi:10.1016/0196-6774(88)90038-7, MR 936106.
- Vishkin, Uzi (1985), "On efficient parallel strong orientation", Information Processing Letters, 20 (5): 235–240, doi:10.1016/0020-0190(85)90025-0, MR 801988.